みのむしクリップ
最新記事 by みのむしクリップ (全て見る)
- 2024年コンサート事情 /猫の日の思い出 - 2025年3月26日
- キャリーオーバー発生中は、外れた証 - 2025年3月25日
- ニート、車をリースする - 2025年3月24日
- 戦闘能力、タウリン4万 - 2025年3月23日
- 技術部の壺の中 – Vol. 133 [アンバサダーの恐怖] - 2025年2月28日
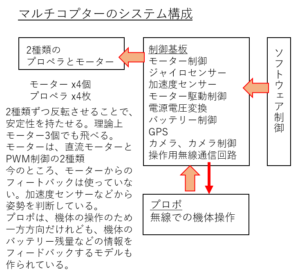
姿勢制御はどうしているかと言えば、
加速度センサー、ジャイロセンサー、地磁気等を使って行うが、
これが以外とうまくいかない。
というのもドローンのプロペラは固定されているので、ヘリの
ように水力の方向を自由に変えることが出来ない。
ラジコンヘリは羽根の向きを自由に変えることが出来るので、
瞬時に推力の方法を変えられる。その場で一回転することも
可能なのだ。マルチローターよりヘリの方が万能かもしれない。
マルチローターは、進行する方向に全体を傾けて進む。
元の姿勢に戻っても、慣性の法則でそのまま進行方向に少し流れる。
この動きは、加速度センサーでは、進行するときに急に加速して、
元の姿勢に戻るときに姿勢面が加速、横のスピードが減速と
感知するけれど、x,y,z軸が傾くので、その時にそれぞれのセンサーが
検知する加速度面も変わる。
また、上を向いている時の判定は、地球の重力加速度を検知して
いるので、傾くとその方向も変わってしまう。
ジャイロは向きが変わった方向を検知するから、姿勢に対して
検知できるけれど、横に進んでいるときとかは分からない。
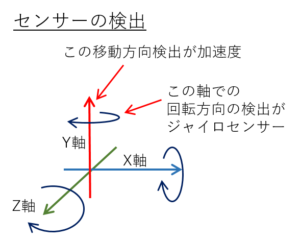
ジャイロは回転を検知して、加速度はそれぞれの軸方向に移動する
瞬間の変化を加速度として検知する。
つまりこの二つのセンサーを組み合わせないと姿勢が判断できないし、
今、自分がどのぐらいの高さにいるかは、判断が出来ない。
高さについては、移動先の地上の構造物や、飛んだ先が崖だったり、
それはもう操作するオペレーター責任。
その他、ワイヤーや電線、電柱、鳥など様々な物体を検知して
当たらないようにしないといけない。
高さは、超音波センサーなどの距離計、横方向の障害物は
小さなカメラを使うことで対応できるが、重さと解析するハードと
ソフトウェアが不可欠。
自作にはソフト的なハードルが高いと難しくなるため、カメラでの
障害物判定は使われない。
せいぜい超音波の高度計ぐらい。
GPSは機体トレースに不可欠なので、大体が搭載している。
航空局に申請する場合に機体の管理として、運航管理上
トレース出来ることが不可欠な要素でもある。
と、センサーだけで、行うのは以外と難しいと思う。
オペレーターがいないと、何かトラブルが有ると対処できない
気もする。
それは、人は加速度で下方向とかを判断しているけれど、
雪山で雪崩に遭って、ぐるぐる回されると上下の感覚も
分からなくなるし、バイクや飛行機が曲がるときは、傾いて
いるけれど、本人達は真下に重力として力を感じている。
相対的な加速度は、ズレが起きやすい。
高速で飛ぶ虫は、太陽を背にして飛行するという。
多分絶対的な座標を元に飛行する方が自分が向いている向きが
把握しやすいからだと思う。
彼らは飛ぶ方向に対して、横を向いたりするため、多分相対的な
感覚で飛ぶとどちらを向いているのか、分から無くなる。
絶対的な座標としての太陽の存在が必要なのだろう。
その副作用で、蛍光灯に円を描きながら近づいて、衝突してしまう
リスクがあっても、太陽にしたがう。
ドローンも絶対座標が必要で、やっぱりGPSの恩恵は絶大。
パニックになると、飛んだところに戻るスイッチがあるけれど、
戻れるのは、GPSが有るから。
電源を入れた場所を覚えている。
だから、ちゃんとしたドローンは、GPSの座標を取得するまで
飛ばない。ちゃんとしていないドローンは、すぐに飛び立てるけど、
パニクったときに戻るボタン(リターン・トゥ・ランチ/RTL)を
押すと、とんでもないところに消えていき、そのまま「さよなら」
することになる。
ハイテクになると、使う方も使い方を理解しないと、
とんでもない二次災害を招いてしまい、その業界まで肩身がせまい
思いをすることになるから、注意が必要だ。
関連ブログ
技術部の壺の中 — Vol. 37 [IT農業 マルチスペクトルカメラの仕組み]
技術部の壺の中 — Vol. 39 [農業 – 解像度と画面の大きさ]
技術部の壺の中 — Vol. 40 [農業 – 被写体との距離]
技術部の壺の中 — Vol. 41 [ドローンの選定]
技術部の壺の中 — Vol. 43 [マルチコプターの概要]