みのむしクリップ
最新記事 by みのむしクリップ (全て見る)
- 2024年コンサート事情 /猫の日の思い出 - 2025年3月26日
- キャリーオーバー発生中は、外れた証 - 2025年3月25日
- ニート、車をリースする - 2025年3月24日
- 戦闘能力、タウリン4万 - 2025年3月23日
- 技術部の壺の中 – Vol. 133 [アンバサダーの恐怖] - 2025年2月28日
農業にドローンを導入!!
って言うと、農薬散布とかということを思うかもしれないけれど、
農薬散布はすでにラジコンヘリがやっていて、重量も20リットルを
散布可能にするには、ローターの回転も相当な物だ。
巨大な回転のこぎりが上空を飛んでいるに等しい。
自動操縦が出来るけれど、そんな危険な物を自動にするほどには、
日本は寛大ではない。
しかも、農薬散布には農薬散布の許可や飛行する物からの投棄など
航空局の許可も必要になる。
ドローンにしても200gを超える重量の飛行は、人口密集地は航空局の
許可が必要で、大体が対象地域。また、その申請にドローンの飛行時間の
記載が必要で、十分な経験が無く、飛行目的がはっきりしない物は
許可されない。
官邸にドローン飛ばした人がいたので、その影響。
教習所みたいな練習施設がないと、許可にたどり着けない。
出来る人には簡単にできるけど、「一見(いちげん)さん」には
ハードルが高くなっている。
だから、農薬散布は今まで通り、農協主導のラジコンエンジンヘリに
任せた方がいい。勿論、ドローンの技術で、より安定して飛行できるように
することは、良いことだと思う。
農業ITと相性が良い使い方は、観測だと思う。
カメラを踏査しての観測だけれども、これも簡単ではない。
■ドローンにカメラ搭載時の要素
・カメラの解像度 –ある程度の解像度が必要。500万画素以上
・明るいレンズ –暗いとシャッタースピードが遅くなる
・ドローンの振動 –振動で画面がずれてしまう。ジンバルが必要
・カメラ重量 –重いとドローンが大きくなる
・撮影場所の記録 –作物は同じなので、撮影場所が分からない
モーターで飛ぶので振動が発生する。
この振動は、早いシャッタースピードで影響を少なくするか、防振対策を
する必要が有る。小さな周期の振動は、機械的な人パルの動きで吸収は
難しいので、ジェルボールを使ったり、球形のゴムを使ったりして
ダンパーの力で吸収する。本当はバネで強度を変えたり、
液体と組み合わせて振動を吸収したりすると面白いんだけど、
そんな心の余裕は与えられなかった。軽量なものを研究したい。
大きな振動や傾きの補正は、ジンバルというモーター駆動の架台で行う。
昔はおもりで安定させていた物もあったけど、重量が大きくなるので
現実的ではない。モーターをセンサーとマイコンで制御して、
水平に安定させる。大きな振動はとれる。
でも、小さな振動がとれたら、後は大きく撮って画像データの一部を
採用することで、傾きとかの動きは吸収できるけれど、
有効画素数が減るのでどちらが良いのかはケースバイケース。
明るいレンズは、シャッタースピードを上げたりするときに有利。
でも、レンズで重くは出来ないので、CMOSセンサーの感度で
カバーするのも必要。でも、COMSセンサはゾーンで区切られているので
ローリングシャッター問題が起きやすい。
振動に不向きなセンサーだ。ほかに選択肢はないんだけど。
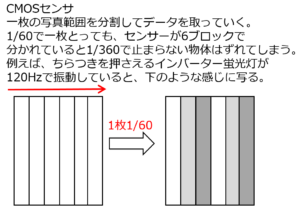
カメラのJpegデータとCMOSセンサのずれる場所から、振動数が
計算できたりする。
カメラの重量が重いと駆動するジンバルの大きさも大きくなるし、
ドローンの持ち上げる重量も必要なので、ローター径やバッテリーの
容量が必要になる。また、上空から観察すると望遠レンズが必要に
なるため、その重量も増えたりする。
これはポリシー的な話もあるけれど、出来ない部分があるのだから
可能性の高い方に寄せるべきだ。
大きなカメラは捨てて、ある程度の軽いカメラを搭載する事が解決に
近づく。800万画素程度のカメラに35mmフィルム換算120mmの
望遠と28mmのレンズをつけて同時に撮影していく方法だ。
レンズは当然スマホより少し大きなレンズにする。駆動部を含めて
100g以下が良い。これを5m以下の高度で運用する。
ドローンの撮影は電線等の障害物を考慮して、100m近くの以外と
高いところから観測される。
この場合、広い範囲を一度に撮影できるのだけれども、詳細は分からない。
詳細と広い範囲は分けて考えた場合、マルチコプターを使用した時は、
近くに寄っての詳細観測が可能なので、それに特化したモデルを使うのは
どだろうか。低い高度で障害物の位置をあらかじめ記録して、
障害物をよけて撮影する。範囲は一度に広くはとれないけれど、
虫などの詳細観測は可能なはずだ。また、田畑ごとの施肥や成長も明確に
区分けできる。
全体と、個別とで用途を分けた方が良く、全体的な手法は衛星や飛行タイプの
ドローンがすでに使われているので、差別化も必要かと思う。
撮影場所は、性能の良いGPSを使うとクリアできるけれど、詳細に
撮る場合はもっと位置が分かった方が良い。
ということから、カメラとGPS計測の最適化した開発が必要だと思う。
で、これらは今のところ、日本に最適な解がないので、きちんと作れば
農業以外にも利用が出来て、とても良いと思うのですが、
日本は無理な感じ。企業間の調和が苦手なので、大体が中国やアメリカに
先手を取られてばかりなり。
関連ブログ
技術部の壺の中 — Vol. 29 [Googleとゼンリンと]
技術部の壺の中 — Vol. 33 [ニート視点のNHK AI特集!]
技術部の壺の中 — Vol. 34 [IoT農業革命??]
技術部の壺の中 — Vol. 35 [農業革命?? 虫探しは大変!!]